دانلود پروژه طراحی ربات با دو درجه آزادی | مکافایل
توضیحات محصول
دانلود پروژه طراحی ربات با دو درجه آزادی
65 صفحه word
چکیده
در فصل اول مدلسازی سینماتیکی صنعتی در دو بخش هندسی و دیفرانسیلی توضیح داده می شود که از آن جمله می توان به تبدیل مختصات در محورهای ثابت و محرک و پارامترهای سینماتیکی اشاره کرد. در این بخش ابتدا به سینماتیکی مستقیم ، سپس سینماتیک معکوس و پارامترهای آن سینماتیک آنی پرداخته خواهد شد .
فصل دوم استاتیک رباتها را مورد بحث قرار می دهد . در این فصل پس از بررسی نیروها و ممان ها ، سختی رباتها و پس از آن ژاکوبین ربات توضیح داده شده است .
فصل سوم دینامیک رباتها ، روش لاگرانژ و دینامیک معکوس توضیح داده شده اند. در این فصل مسائلی از قبیل ، معادلات حرکت و تانسور اینرسی مورد بررسی قرار گرفته اند. در بخش دینامیک رباتها توضیحات کلی در مورد نحوه بررسی و مدل ازی دینامیکی رباتها داده شده است . بخش روش لاگرانژ شامل موضوعات مدلسازی دینامیکی ربات از طریق روشهای مربوطه است و در قسمت دینامیک معکوس ، مسائل بازگشتی در دینامیک مورد بحث می باشد .
فصل چهارم با انواع روش های طراحی یک روبات صنعتی آشنا خواهیم شد و در ادامه یکی از این روش ها ی مختلف در طراحی روبات که با عنوان روش نیوتن – اویلر میباشد توضیح داده خواهد شد. در این روش معادلات حرکت روبات از قانون نیوتن که رابطه نیرو و گشتاور ممان زاویه ای را بیان میکند استخراج میشوند.
مقدمه
امروزه انواع روبات هایی که در دنیا وجود دارند ما را در انجام بسیاری از فعالیت های صنعتی ، کشاورزی ، تجاری ، خانگی و … سهل و آسان نموده اند. لذا آنچه که روز به روز در پیشرفت این حرفه یعنی طراحی و ساخت انواع روباتهای صنعتی ، مهم و حیاتی به نظر می آید طراحی و ساخت ابزارهایی است که بتواند خواسته های مورد نیاز بشریت را مرتفع سازد. بنابراین می بینیم که طراحی و ساخت این چنین روباتهایی چقدر برای بشر دارای اهمیت می باشد .
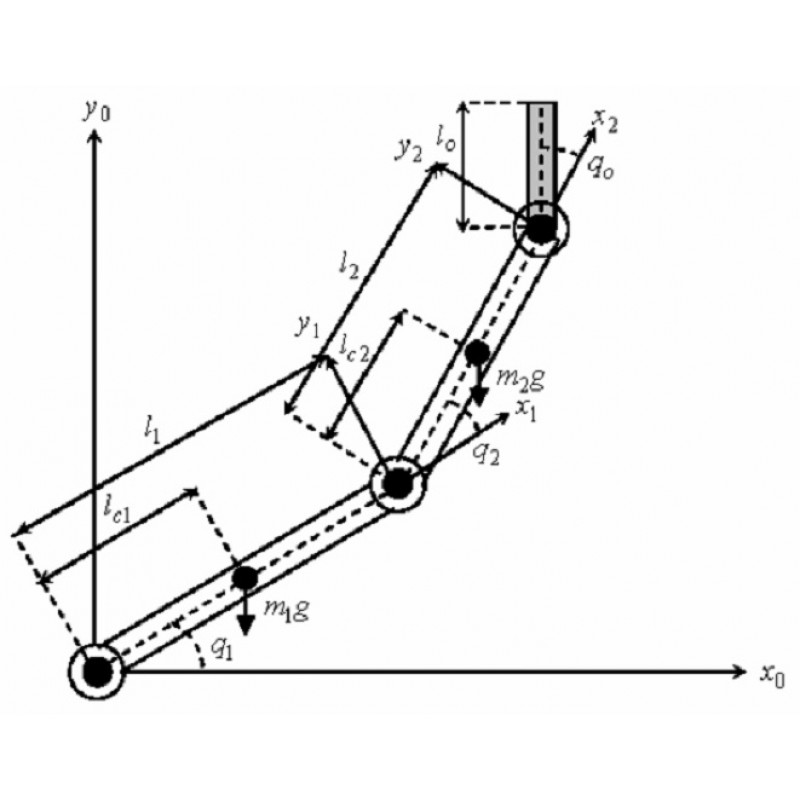
لذا در این مجموعه ای که شما ملاحظه می فرمائید طراحی یک روبات با دو درجه آزادی در صفحه قائم در نظر گرفته شده است تا با طراحی این چنین روبات هایی بیشتر از قبل آشنا گردیم. روبات مذکوری که در این مجموعه در مورد طراحی آن بحث و گفتگو خواهد شد روباتی است که دارای دو بازو می باشد که برای به حرکت در آوردن از این بازوها نیاز به یک موتور می باشد که می بایست برای کنترل حرکت بازوهای این روبات از یک کنترل کننده مناسب استفاده شود.
فهرست
مقدمه ………………………………………………………………………………………………………………………………………………1
فصل اول :مدلسازی سینماتیکی رباتها
1-1- مقدمه ………………………………………………………………………………………………………………………………………3
1-1-1- موقعیت و جهت یک جسم صلب ……………………………………………………………………………………………..3
2-1-1-تبدیلات مختصات ………………………………………………………………………………………………………………….4
3-1-1-تبدیلات همگن……………………………………………………………………………………………………………………….6
2-1-مدل سازی سینماتیکی رباتهای صنعتی I ………………………………………………………………………………………….8
1-2-1-زنجیرهای باز سینماتیکی ………………………………………………………………………………………………………….8
2-2-1-نامگذاری دناویت – هارتنبرگ ……………………………………………………………………………………………….10
3-2-1-معادلات سینماتیکی ……………………………………………………………………………………………………………..13
3-1- سینماتیک معکوس ربات صنعتی ……………………………………………………………………………………………….14
4-1-مدلسازی سینماتیکی رابتهای صنعتی II(حرکت دیفرانسیلی) …………………………………………………………….15
5-1- مدلسازی سینماتیکی حرکات آنی ……………………………………………………………………………………………..16
1-5-1-روابط دیفرانسیلی ………………………………………………………………………………………………………………….16
6-1- سینماتیک آنی معکوس …………………………………………………………………………………………………………….19
1-6-1- نرخ حرکت مقرره ……………………………………………………………………………………………………………….19
فصل دوم :استاتیک رباتهای صنعتی
1-2تجزیه وتحلیل نیروها و ممانها ……………………………………………………………………………………………………….21
1-1-2تعادل نیروها و ممانها ……………………………………………………………………………………………………………….21
2-1-2-گشتاور معادل مفاصل ……………………………………………………………………………………………………………23
3-1-2-رابطه نیروی نقطه انتهایی و گشتاورهای مفاصل ………………………………………………………………………….23
4-1-2-تبدیلات نیروها و ممانها …………………………………………………………………………………………………………24
2-2سختی ………………………………………………………………………………………………………………………………………25
1-2-2-تجزیه وتحلیل قابل قبول نقطه انتهایی ……………………………………………………………………………………….26
3-2-ماتریس ژاکوبین ………………………………………………………………………………………………………………………27
1-3-2-روش اول محاسبه ماتریس ژاکوبین ………………………………………………………………………………………….28
2-3-2- روش دوم محاسبه ماتریس ژاکوبین …………………………………………………………………………………………30
فصل سوم : مدلسازی دینامیکی رباتهای صنعتی
1-3-دینامیک لاگرانژی ……………………………………………………………………………………………………………………33
1-1-3-مدلسازی دینامیکی ربات به روش لاگرانژین …………………………………………………………………………….33
2-3-تانسور اینرسی ربات …………………………………………………………………………………………………………………34
3-3- استخراج معادلات حرکت …………………………………………………………………………………………………………36
4-3-دینامیک معکوس …………………………………………………………………………………………………………………….37
5-3مدل لاگرانژین به روش بازگشت پذیر (Recurssive) …………………………………………………………………….39
فصل چهارم : طراحی روبات به روش نیوتن – اویلر
1-4- مقدمه ……………………………………………………………………………………………………………………………………41
2-4- طراحی روبات با دو درجه آزادی ……………………………………………………………………………………………….41
1-2-4 – روش نیوتن – اویلر در طراحی روبات با دو درجه آزادی ………………………………………………………….42
2-2-4- شکل بسته معادلات نیوتن – اویلر …………………………………………………………………………………………..49
3-4- حل معادلات روبات به روش سینماتیکی ………………………………………………………………………………………51
پیوست
منابع ………………………………………………………………………………………………………………………………………………56
4 دیدگاه
نظری بدهید
نماد اعتماد الکترونیکی

دروازه پرداخت امن زرین پال
نماد اعتماد الکترونیکی
دروازه پرداخت امن زرین پال
مهندس
سلام
لطفا توضیحات بیشتری از فایل قرار بدین
تشکر
732 of 1490 people found this review helpful.
Help other customers find the most helpful reviews
Did you find this review helpful?
بله خیر
سلام دوست عزیز
توضیحات فایل جهت بررسی بیشتر شما تکمیل گردید
749 of 1493 people found this review helpful.
Help other customers find the most helpful reviews
Did you find this review helpful?
بله خیر
پرداخت
سلام
بعد از پرداخت لینک دانلود میاد؟
746 of 1490 people found this review helpful.
Help other customers find the most helpful reviews
Did you find this review helpful?
بله خیر
سلام دوست عزیز
بله بلافاصله بعد از انجام پرداخت لینک دانلود نمایان میشود
همچنین لینک دانلود به ایمیل شما ارسال میگردد
740 of 1487 people found this review helpful.
Help other customers find the most helpful reviews
Did you find this review helpful?
بله خیر